Contact-Grounded Policy enables the acquisition of contact-rich dexterous manipulation skills. For these tasks, the policy must go beyond pick-and-place, leveraging multi-finger control to adjust contacts in real time and achieve appropriate, stable interactions.
Fragile Egg Grasping (Sim)
Dish Wiping (Sim)
In-Hand Box Flipping (Sim)
Jar Opening (Real)
In-Hand Box Flipping (Real)
We developed two teleoperation pipelines. For the real robot, we use a mocap-based hand-tracking teleoperation system; for simulation, we use a VR-based teleoperation setup. Together, these pipelines provide real-time, smooth, stable, and responsive teleoperation for complex manipulation behaviors, enabling high-quality data collection.
We implement a joint-space PD controller for the hand and an operational-space impedance controller for the arm, enabling whole-body compliance across the arm–hand system. This provides a foundation for deploying contact-rich dexterous manipulation policies in real-world settings.
With a unified latent tactile diffusion design, Contact-Grounded Policy supports both vision-based tactile sensors (left) and dense tactile arrays (right).
Four-Finger Allegro V5 Hand with Digit360 Fingertip Tactile Sensors
Five-Finger Tesollo DG-5F Hand with Dense Whole-Hand Tactile Arrays
At each inference step, the diffusion model predicts the next 16 steps of tactile feedback and actual states, which are mapped to target states and executed for 8 steps before the next inference. To verify that predicted contacts are actually realized during execution, we time-align tactile frames predicted at earlier replanning steps with tactile feedback observed at the corresponding future time steps. Predicted tactile is time-aligned with subsequent observations after execution, and the close match indicates that CGP executes contact-grounded targets and realizes the predicted contact evolution.
Contact-Grounded Policy is robust to visual disturbances, and can continue completing the box-flipping task even under dynamic visual perturbations.
Contact-Grounded Policy
Contact-Grounded Policy
Visuomotor Diffusion Policy
Slip During Flipping
Visuotactile Diffusion Policy
Incomplete Flip
 1Purdue University
1Purdue University
 2Meta Reality Labs Research
2Meta Reality Labs Research
 3University of Wisconsin–Madison
3University of Wisconsin–Madison
@misc{xu2026cgp,
title={Contact-Grounded Policy: Dexterous Visuotactile Policy with Generative Contact Grounding},
author={Zhengtong Xu and Yeping Wang and Ben Abbatematteo and Jom Preechayasomboon and Sonny Chan and Nick Colonnese and Amirhossein H. Memar},
year={2026},
eprint={2603.05687},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2603.05687},
}
Existing policies typically predict purely kinematic targets, without modeling the contact state or how their action outputs interact with low-level controller dynamics. As a result, when deployed in unseen scenarios, they can produce physically infeasible behaviors—for example, overly stiff motions or insufficient force that leads to slipping.
Overly Stiff Motions
Insufficient Force
A key observation is that, under a fixed tactile sensor and compliance controller setup, contact can be captured by a triplet: the robot’s actual state, tactile feedback, and the controller reference (target state), as illustrated in Fig. (a). Building on this coupling, our policy grounds multi-point contacts by predicting coupled trajectories of robot state and tactile feedback, and using a learned contact-consistency mapping to translate these predictions into executable target states for the compliance controller, as shown in Fig. (b). This yields a compact, implicit, setup-dependent model learned purely from data—without explicitly modeling contact locations/modes or system dynamics—while remaining flexible to distributed, evolving multi-point contacts that are hard to parameterize by hand. In this way, contact becomes a controller-realizable state that can be directly executed by the low-level controller.
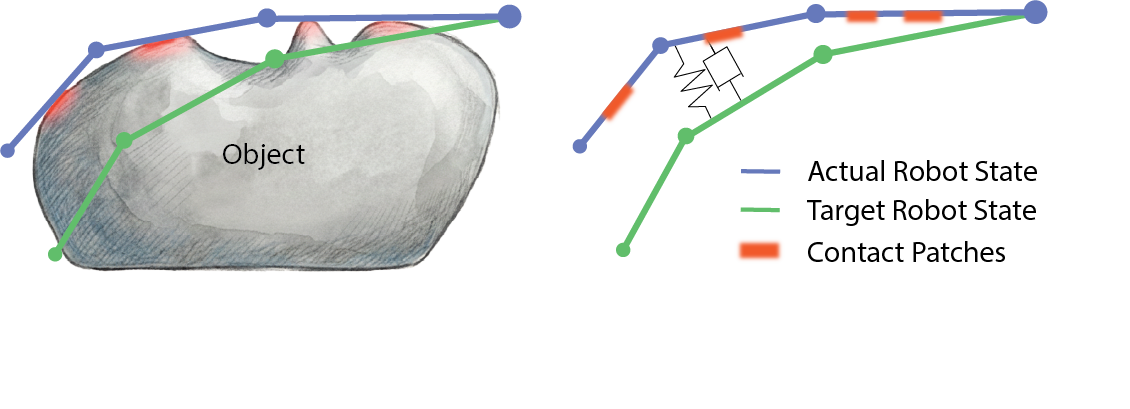
(a) Schematic of Contact Grounding Using a 3-DoF Revolute Finger
(b) Pipeline of Contact-Grounded Policy